DroneMapper has just been notified by the city of Denver, Colorado that is has been selected as a top-10 finalist in a business competition called "JumpStart, Biz 2012". The competition looks for innovative business ideas that can contribute to the growth and health of Denver, CO. 150 applicants submitted their ideas during the first phase. The second phase – more in depth evaluation of business plans occurs for the next 2-3 weeks with the finalist announced in late October. First prize is $50,000, one year of office space in Denver, CO, and business mentoring. We look forward to attending the JumpStart Biz Plan Awards events and Startup Week Denver. For more information please visit the Denver OED website at the following link: more..
Fly Through 3D Digital Forest Orangutan Nest
3D forest model of a transect in Sumatra, Indonesia, based on aerial images acquired by Conservation Drones. Animation by Ervine Lin of ETH Future Cities Laboratory (futurecities.ethz.ch). Please visit ConservationDrones.org for more information.

Change Detection, Object Counting and Remote Sensing
We've been busy working on some new features for the DroneMapper system like change detection, object counting, and remote sensing! The example below is of an industrial water treatment plant in the Netherlands. Using the geo-referenced orthomosaic that DroneMapper creates and opencv we can detect certain features and create shapefiles from them. Here the algorithm is looking for round objects of a certain size and attributes. If detections occur, a geo-referenced shapefile mask of the target is created! I am working to add different routines to count and classify different objects in the final orthomosaic. It seems possible to count the number of vehicles, buildings, roads, vegetation, etc once the process and workflow are completed.
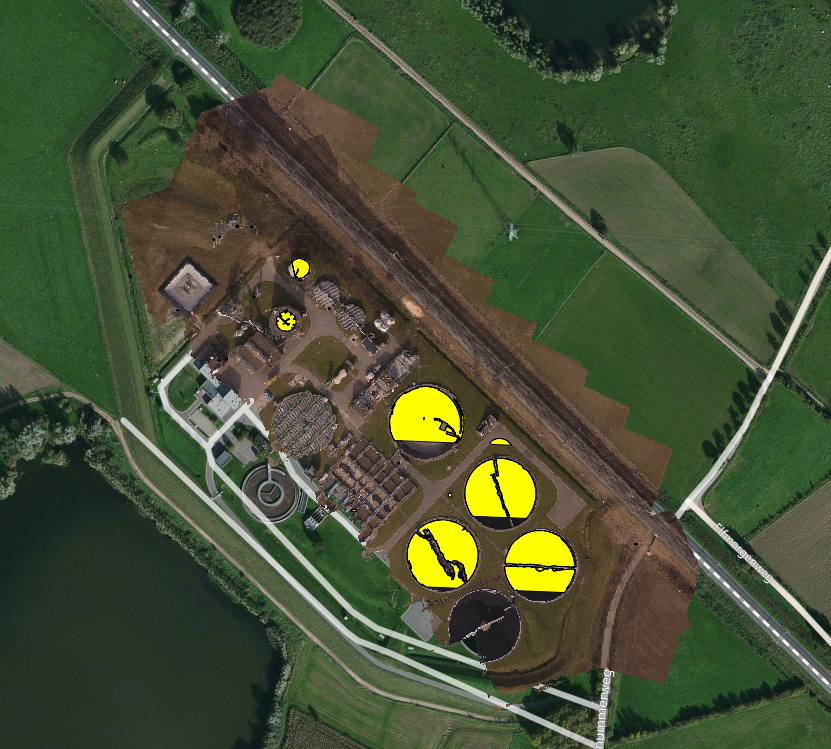
Results of Round Object Detection
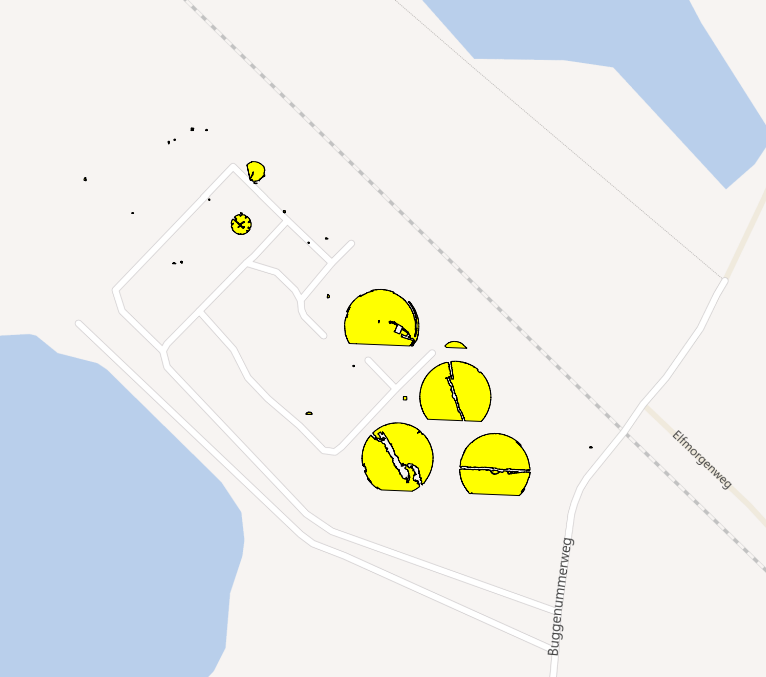
Generated Shapefile Output of Targets on Bing Maps Layer
DroneMapper Supporting ConservationDrones.Org Team
Lian Pin Koh and Serge Wich are doing some really interesting work with Drones. They have created a non profit organization called Conservation Drones (conservationdrones.org) with a mission to develop low-cost tools for conservation and research workers in developing countries! Here is a bit more in their own words:
“Conservation Drones are inexpensive, autonomous and operator-friendly unmanned aerial vehicles for surveying and mapping forests and biodiversity. Non-technical operators can program each mission by defining waypoints along a flight path using an open-source software.”
“We believe that Conservation Drones have great potential for environmental and conservation applications, which include near real-time mapping of local land cover, monitoring of illegal forest activities, and surveying of large animal species.”
See the screenshots below of an Orangutan nest photograpped in 2D using a Conservation Drones UAV. DroneMapper processed this imagery into an orthomosaic scene, digital elevation model, digital surface model and 3D Point Cloud (3D Model). The flight contained 18 NADIR images obtained with a Canon Powershot SX230 HS at an elevation of 80m above jungle canopy.
We look forward to our work with Lian and Serge in the future!
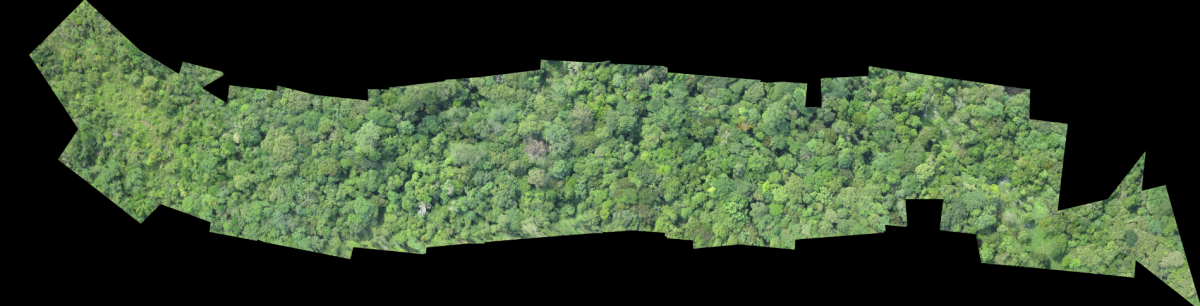
Full Orthomosaic
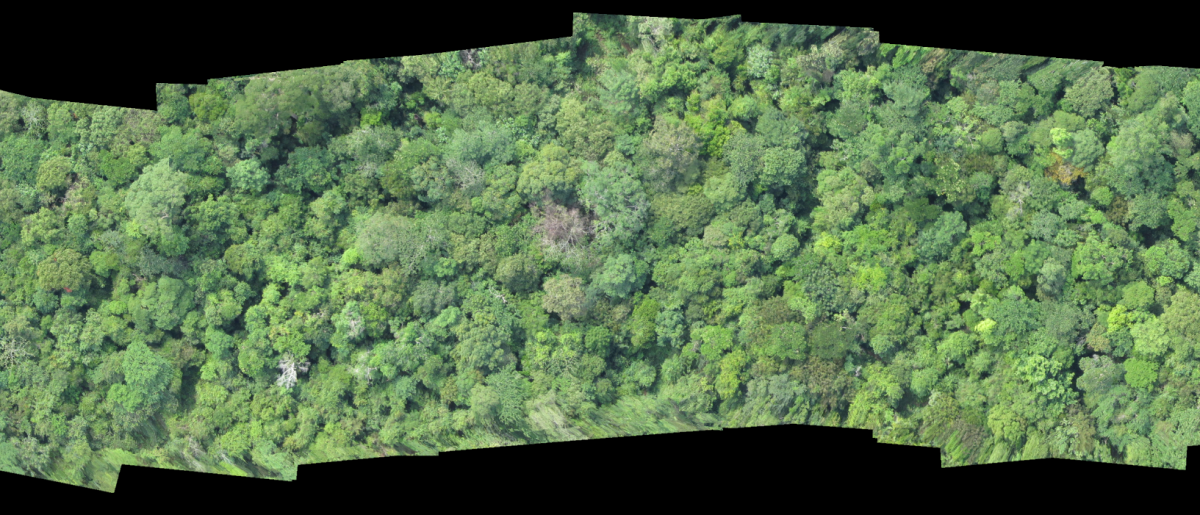
Orthomosaic – Nest Close
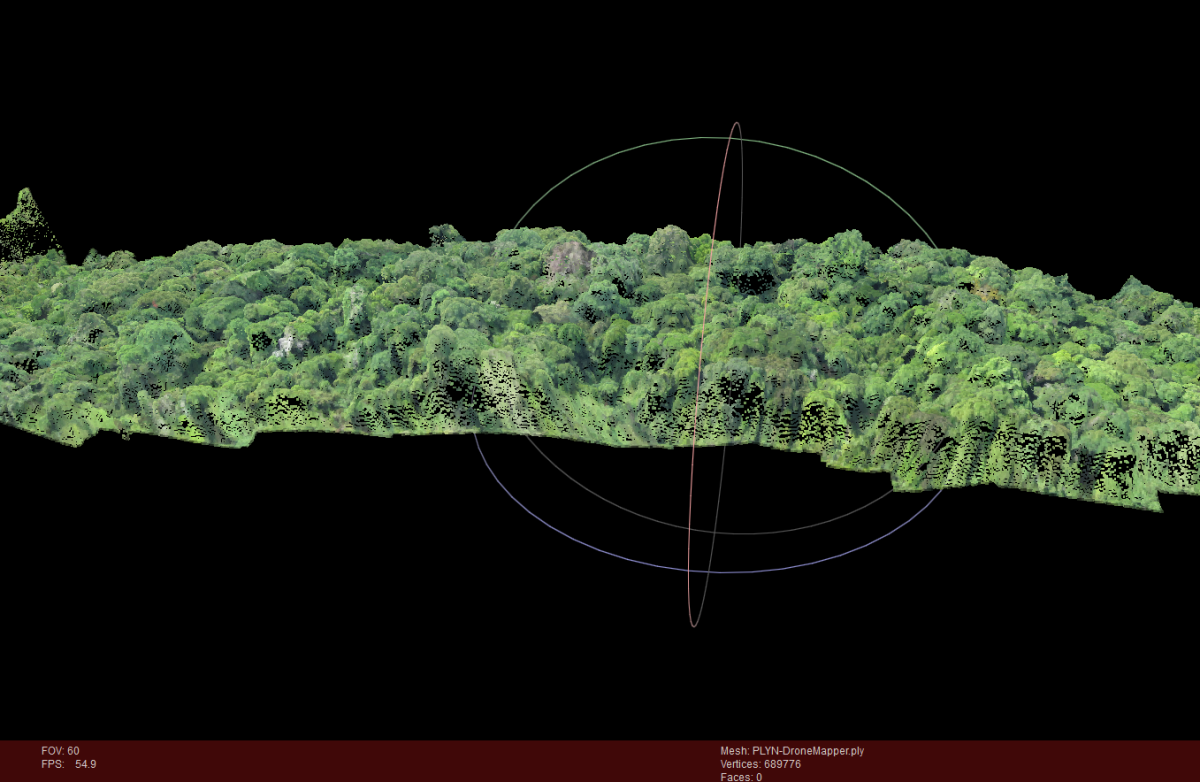
3D Point Cloud / PLY in Meshlab.
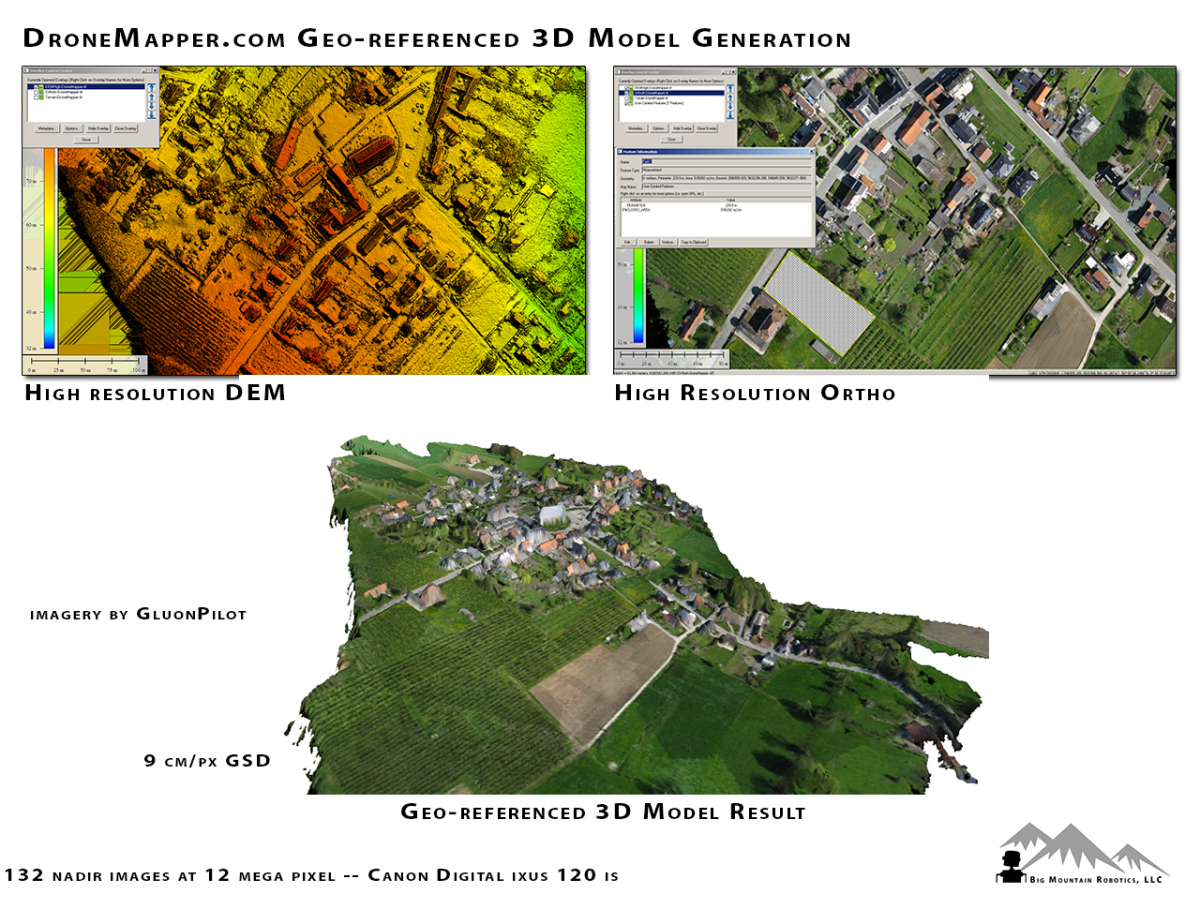
Georeferenced 3D Model Generation
Georeferenced 3D model generation from Gluonpilot imagery. 132 NADIR images from a Canon Digital IXUS IS camera.