December 31st, 2012
We've updated the DroneMapper imagery processing suite with the following fixes and new features for 2013:
- All GeoTIFF products are clipped to Area of Interest (AOI) mask or AOI shapefile provided by the customer or automatically generated in our processing chain.
- 32 Bit DEM product is clipped to AOI mask or shapefile automatically.
- 32 Bit DEM nodata areas have been minimized.
- 8 Bit DEM remains unchanged.
- Orthomosaic(s) products have an alpha band indicating nodata and transparency.
- DSM product is clipped to AOI with nodata set to 0 (black).
- Improvements to Orthomosaic equalization, blending and color balance.
- Additional algorithm improvements and testing.
- New BigTIFF and BigDEM generation, large area tiling and processing workflow.
- Ground Control Point feature, Windows 2D GCP generation tool.
- Improvements in website user interface to allow traffic from mobile devices.
- Improved SSL support.
Please see below for more details on certain features and changes.
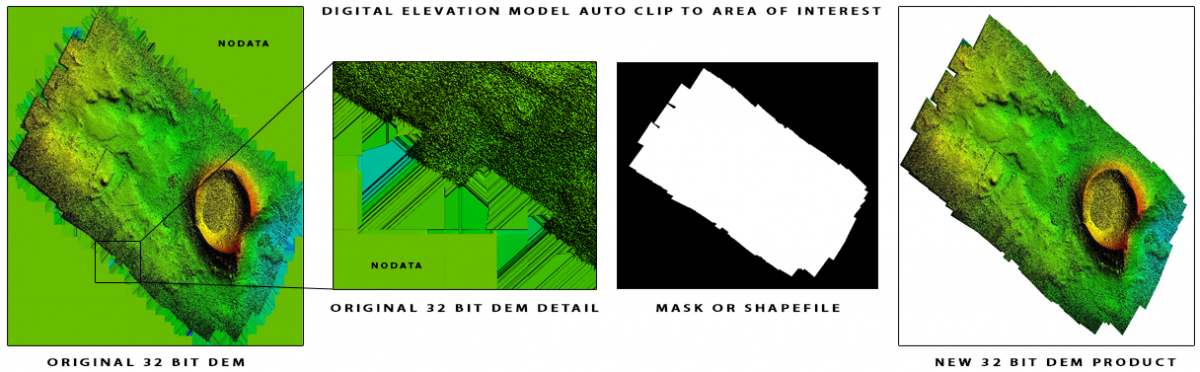
The example above shows the original Digital Elevation Model product on the left and new DEM product on the right. The result is clipped to the Area of Interest (AOI) and the nodata values are set to allow transparency.
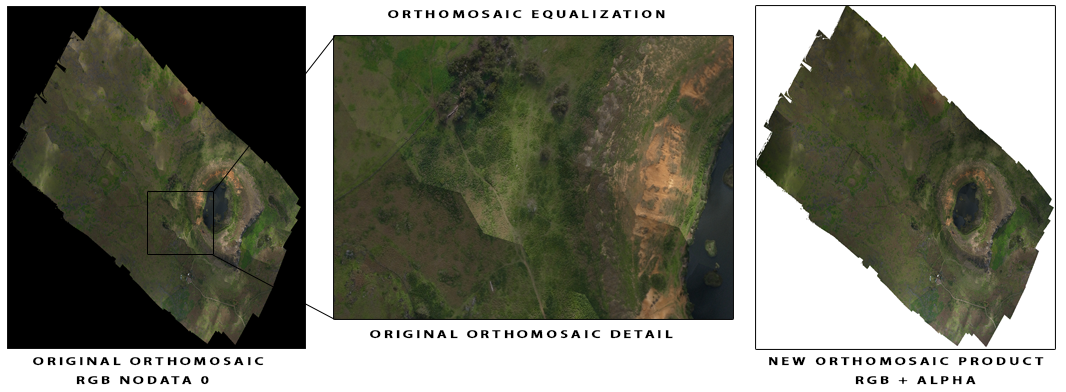
We've made significant improvements with our Orthomosaic color balancing and blending routines. Additionally, we've added an alpha channel to the product for transparency and better support in GIS software packages.
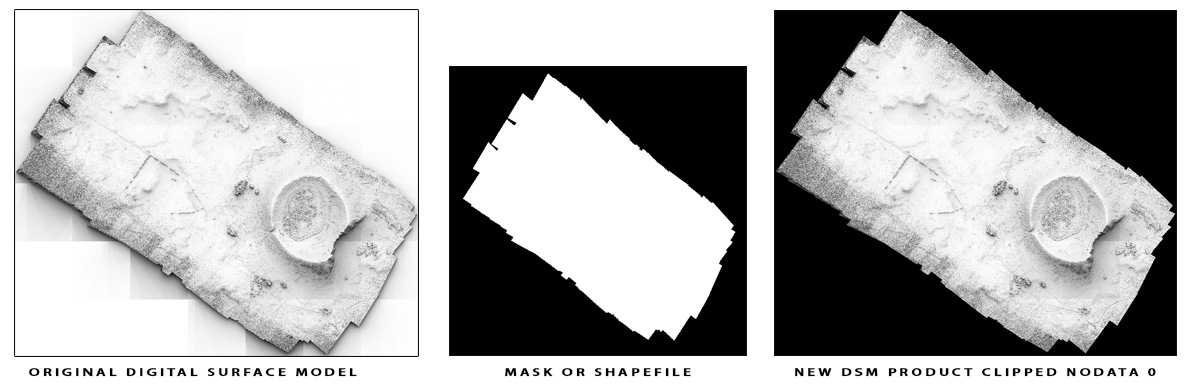
The example above shows the original DSM product on the left. Using an automatically generated mask or customer provided shapefile the AOI is clipped and a new DSM is generated. Nodata values have been assigned to 0 to allow for background transparency display inside GIS software packages.
Virtual Terrain Project (VTP)
Recently we used the open-source Virtual Terrain Project (VTP) which easily constructs any part of the real world in interactive 3D digital form. Ben Discoe and the VTP team have put together a very useful software package and a site packed with great information.
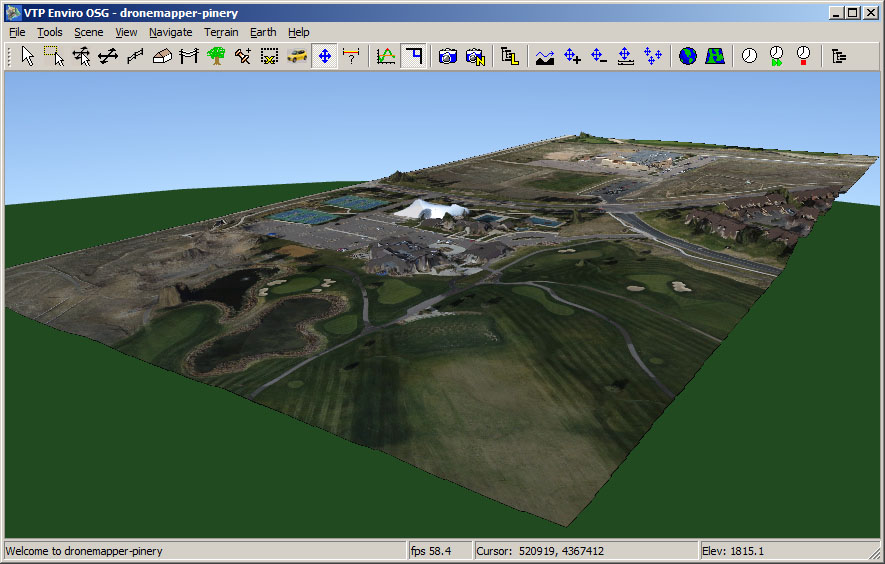
The example screenshot above provided by Ben Discoe shows a portion of the Pinery data set modeled with VTP.