We are selling our Pulsar MantaRay Area-Velocity meter that ultrasonically measures flow in a range of open channels.
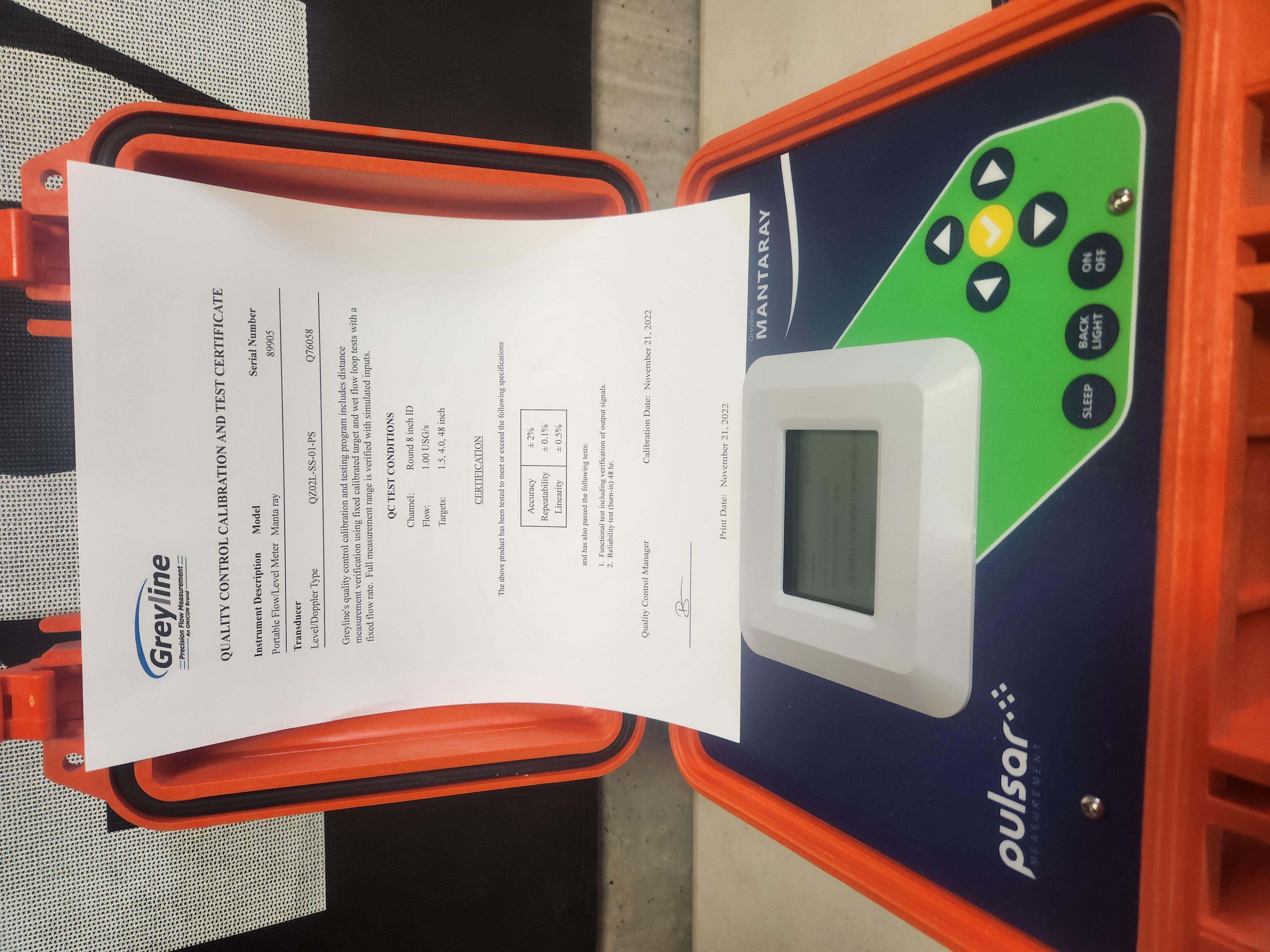
Pic1 illustrates the sensor components: portable rugged MantaRay electronics enclosure (with calibration certificate, close up in Pic2), immersible ultrasonic sensor with 25-feet of cable shown in front, battery charger shown to the right and breakout box shown to the left of main unit. This is a lightly used unit in excellent condition, we are ramping down our drone mapping business and selling assets. Thanks, and let us know with questions. JP
$4000 USD + Shipping
The MantaRay is a portable area velocity meter that measures flow using a submersible ultrasonic sensor. The unit is designed for flow surveys in open channels, partially-full sewer pipes, and surcharged pipes – making the portable open channel flow meter suitable for sewer monitoring, industrial flow monitoring, irrigation flow, and natural streams.
Easy to Use
The MantaRay Portable Area-Velocity Flow Meter measures both level and velocity to calculate flow in an open channel or pipe. Calibration is simple: enter the pipe diameter or channel dimensions and the MantaRay automatically computes and displays the flow rate and total on its backlit LCD display.
The ultrasonic sensor mounts inside the pipe or on the bottom of a channel with a stainless-steel mounting bracket (included) and a single screw into the bottom of the pipe or channel. No special compounds, tools, or hardware are required. The sensor is completely sealed with no orifices or ports, making it resistant to build-up and fouling.
Sleep Mode for Extended Battery Life
Use the MantaRay’s ‘Sleep Mode’ function to extend battery life while logging flow. The digital display, outputs, and non-essential functions are suspended during sleep mode. Based on the logger interval, the MantaRay activates the sensor for 12 seconds to obtain flow readings and then resumes low power mode until the next logger sample interval. To indicate that sleep mode has been activated, the digital display flashes every few seconds while sleeping.
External Battery Input
Connect external 12 or 24 V DC batteries to extend the MantaRay’s operating time indefinitely. Or connect the battery charger supplied with each flowmeter for continuous operation or long-term 4-20mA output and relay operation.
Suitable for Portable Flow Monitoring
Because of the portability of the MantaRay, the unit is ideal for applications such as flow verification, sewer flow monitoring, and reporting, industrial effluent monitoring, stormwater monitoring, natural streams, and irrigation water.
Pair with SignalFire RANGER for Telemetry Cloud-based Reporting
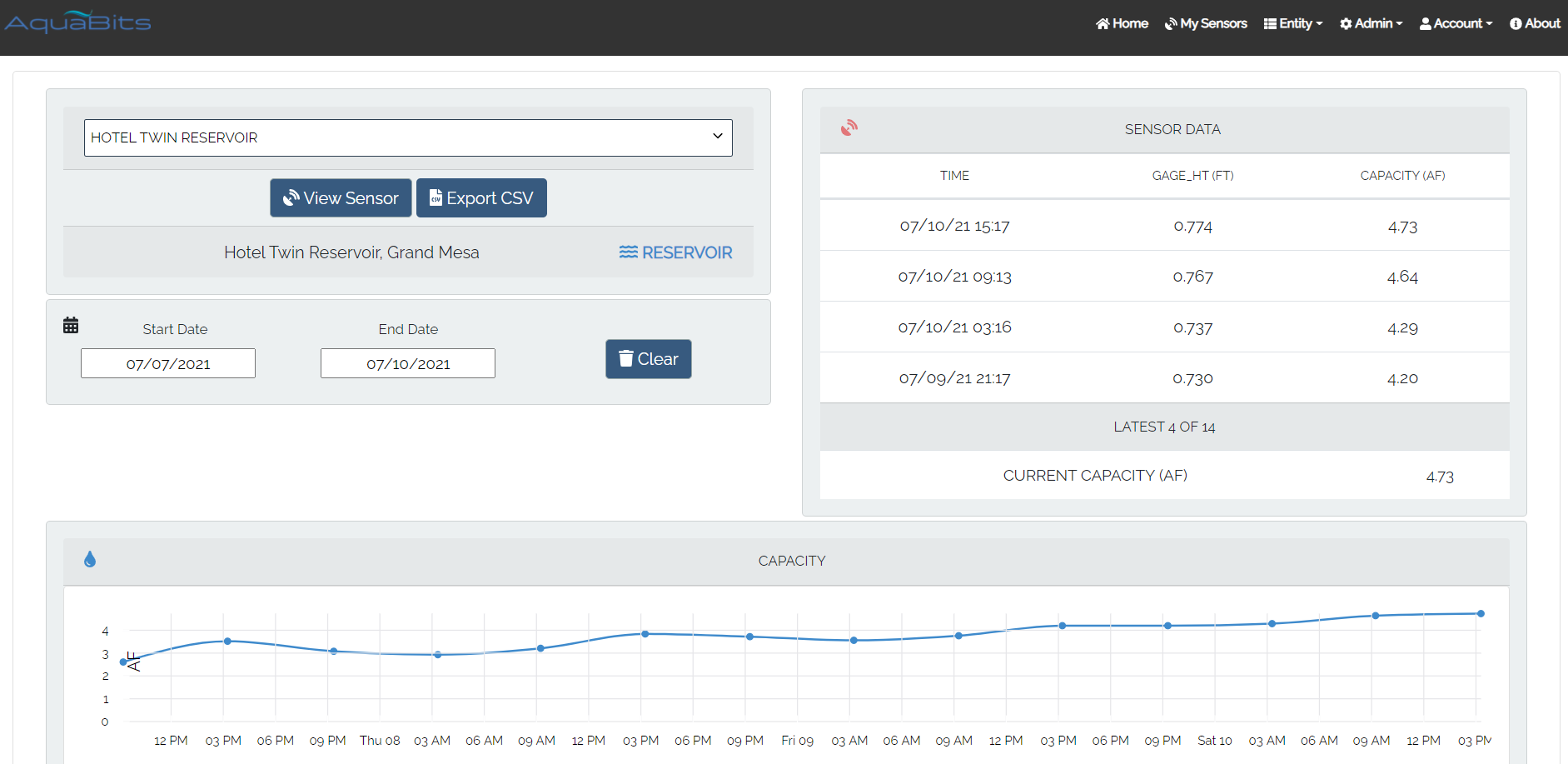
When combined with the SignalFire RANGER, the MantaRay can be deployed in a power-saving “sleep” mode and “wake-up” when the RANGER powers on to send measurement data to the cloud. Use this completely portable combination for real-time insights into your wastewater, environmental, or irrigation flow application in a partially filled pipe or channel.
More details here.
$4000 USD + Shipping
The MantaRay is a portable area velocity meter that measures flow using a submersible ultrasonic sensor. The unit is designed for flow surveys in open channels, partially-full sewer pipes, and surcharged pipes – making the portable open channel flow meter suitable for sewer monitoring, industrial flow monitoring, irrigation flow, and natural streams.
Easy to Use
The MantaRay Portable Area-Velocity Flow Meter measures both level and velocity to calculate flow in an open channel or pipe. Calibration is simple: enter the pipe diameter or channel dimensions and the MantaRay automatically computes and displays the flow rate and total on its backlit LCD display.
The ultrasonic sensor mounts inside the pipe or on the bottom of a channel with a stainless-steel mounting bracket (included) and a single screw into the bottom of the pipe or channel. No special compounds, tools, or hardware are required. The sensor is completely sealed with no orifices or ports, making it resistant to build-up and fouling.
Sleep Mode for Extended Battery Life
Use the MantaRay’s ‘Sleep Mode’ function to extend battery life while logging flow. The digital display, outputs, and non-essential functions are suspended during sleep mode. Based on the logger interval, the MantaRay activates the sensor for 12 seconds to obtain flow readings and then resumes low power mode until the next logger sample interval. To indicate that sleep mode has been activated, the digital display flashes every few seconds while sleeping.
External Battery Input
Connect external 12 or 24 V DC batteries to extend the MantaRay’s operating time indefinitely. Or connect the battery charger supplied with each flowmeter for continuous operation or long-term 4-20mA output and relay operation.
Suitable for Portable Flow Monitoring
Because of the portability of the MantaRay, the unit is ideal for applications such as flow verification, sewer flow monitoring, and reporting, industrial effluent monitoring, stormwater monitoring, natural streams, and irrigation water.
Pair with SignalFire RANGER for Telemetry Cloud-based Reporting
When combined with the SignalFire RANGER, the MantaRay can be deployed in a power-saving “sleep” mode and “wake-up” when the RANGER powers on to send measurement data to the cloud. Use this completely portable combination for real-time insights into your wastewater, environmental, or irrigation flow application in a partially filled pipe or channel.
More details here.